China service robot industry: Guangdong to further support AI firms
China service robot industry: Guangdong to further support AI firms
By ZHENG CAIXIONG in Guangzhou | China Daily | Updated: 2025-04-11 09:05

South China’s Guangdong province will spare no effort to support artificial intelligence and robotics companies in achieving breakthroughs in technology industrialization, product marketing and service commercialization in the coming months, a senior official said.
The latest move aims to continuously provide high-quality and affordable products and services for local companies as well as households, accelerating the empowerment of thousands of industries with AI and deepening the application of “robot+” scenarios, said Qu Xiaojie, deputy director of the Guangdong Department of Industry and Information Technology.
“Meanwhile, Guangdong, a global innovation center, sincerely welcomes scientists, entrepreneurs and young talent from around the world in the fields of AI and robotics to invest and develop the AI and robotics industry in the province,” he said.
Qu said that his department would ensure coordination of resources, cultivation of enterprises, industrial agglomeration, ecological optimization and promotion of exchanges to support innovation and development by enterprises in the AI and robotics industry in the province, which is also a major production base in the world.
Qu made the remarks at a news conference in Guangzhou, the provincial capital, on Wednesday.
Qu said Guangdong has potential to develop the AI and robotics industry, as the Guangdong-Hong Kong-Macao Greater Bay Area combines the advantages of electromechanical and digital intelligence technology, with a complete AI and robotics industry chain, complete support facilities, fast response, high quality, good service and excellent ecology.
The province, an economic powerhouse of the country, has become a mecca for global talent, technology and capital, he said.
Guangdong has excellent computing chips like the Huawei Ascend and self-developed general-purpose models like Tencent Cloud, according to Qu.
And the eight major models in the AI industry of Guangdong have been preliminarily applied in related fields and achieved significant results, he added.
Wang Jian, general manager of Tencent Cloud Guangdong province, said Tencent Cloud’s AI large model has been implemented in more than 30 industries, including government affairs, retail, finance and industry.
Tencent will continue to lower the technological threshold and focus on scenario implementation, using its “useful, easy-to-use, and reliable” AI capabilities to help Guangdong’s AI and robotics industry enter into an era of global, full-time and all-scenario intelligence, he said.
“And we have now launched Tencent Cloud Intelligent Computing Suite by integrating high-performance computing, storage, networking, acceleration suite, cloud native intelligent scheduling and orchestration capabilities, to help customers manage their economic accounts with computing power,” Wang said.
Hao Shengwei, marketing director of Huawei Ascend Computing Business, said Huawei Ascend has been focusing on key technologies and continues to innovate by combining computing, storage, networking and other capabilities.
“It has continuously improved its hardware and software capabilities, developed many fusion operators, and opened up many basic software and capabilities to partners for them to create their own applications and operators,” he said.
Hao said more than 80 partners have now built their large model application all-in-one machines based on Ascend’s computing power base, which have been applied in more than 200 enterprises.
“Many companies have built their own technology and computing power based on Ascend, and we will continue to make AI truly enter various industries,” he added.
Service Robots in China: Innovation, Market Growth, and Global Leadership
Service Robots in China: Innovation, Market Growth, and Global Leadership



1. Market Overview: A Global Powerhouse
China has dominated the global robotics market since 2015, with service robots emerging as a key growth driver. Key statistics:
| Metric | 2023 Data | Projection (2028) | Source |
|---|---|---|---|
| Service Robot Market Size | ¥60 billion ($8.3B) | ¥150 billion | :cite[4]:cite[8] |
| Home Robot Penetration | 10% (urban) | 25% | :cite[4] |
| Export Revenue | ¥1.51B ($208M) | ¥4.2B | :cite[2] |
1.1 Growth Drivers
- Aging Population: 264M Chinese aged 60+ by 2025 needing elderly care robots :cite[4]
- Smart City Initiatives: 500+ cities deploying public service robots :cite[8]
- Manufacturing Evolution: 14.9% CAGR in mobile robots for logistics :cite[8]
2. Technological Breakthroughs

Image: R&D at Shenzhen Robotics Innovation Center (Source: China Daily)
2.1 Core Innovations
- 5G Integration: 1ms latency enables real-time control in hospital delivery robots :cite[8]
- Multi-sensor Fusion: Pudu Robotics’ VSLAM technology achieves 99.2% navigation accuracy :cite[2]
- Edge AI Computing: Cloud Whale’s J4 vacuum processes 15 TOPS locally for rapid decision-making :cite[2]
3. Sector-Specific Applications
3.1 Healthcare Revolution

Image: Disinfection robots at Wuhan Union Hospital (Source: Xinhua)
- 23,000+ hospital delivery robots deployed nationwide :cite[4]
- 40% reduction in nurse workload through AI triage systems :cite[8]
3.2 Retail & Hospitality
- 7,500+ restaurants using PuduTech’s BellaBot servers :cite[2]
- Hilton China’s 98% guest satisfaction rate with concierge robots :cite[4]
4. Global Expansion Strategies

Image: Canton Fair 2025 Service Robot Zone (Source: Sohu) :cite[1]
- 124 international trade delegations at 137th Canton Fair robotics zone :cite[1]
- Localization success: Yarbo snow robots capture 38% of North American market :cite[2]
- EU certification: Keenon Robotics meets 60+ country standards :cite[2]
5. Challenges & Future Outlook
5.1 Key Challenges
- 30% higher R&D costs vs international peers :cite[8]
- Semiconductor supply chain vulnerabilities :cite[7]
5.2 2025-2030 Predictions
- Human-robot collaboration: 70% of new models will feature cobot functions :cite[8]
- AI ethics framework: National standards under development :cite[7]
Conclusion
China’s service robot industry combines massive domestic demand with cutting-edge innovation, positioning the country as the global leader in intelligent automation solutions. With continued government support and industry collaboration, Chinese robotics firms are set to redefine service delivery worldwide.
Chinese robotics industry: Spotlight on AI as future game changer
Spotlight on AI as future game changer
China fostering own vision of development through reliable, efficient application of artificial intelligence tools across industry sectors

Delegates and visitors to the Zhongguancun Forum, a key technology event held in Beijing recently, were in for a surprise when they arrived at the venue late last month.
As they stepped in, they were greeted not by ushers in uniform, but by a coordinated team of robots that mimicked human expressions, answered queries and translated conversations in real time.
In the shadow of a series of bullying (tariffs) imposed by the Trump administration earlier this month, China is doubling down on what may be its most potent counterstrike: AI. From breakthrough chips to frontier models rivaling the West’s best to humanoid robots, China’s AI breakthroughs could stand out to be a potential game changer, industry experts said.
Elsewhere at the venue, a robot with a friendly voice and precise movements guided guests to a coffee corner where a robotic barista brewed fresh beverages. And, once the coffee was ready, another humanoid robot delivered it directly to the guest.
While other robots played chess with visitors or displayed their brush calligraphy skills with serene focus, some robotic dogs darted easily through the crowd of visitors.
This was just one of several events held last month where artificial intelligence took center stage.
In March, China saw a series of major events, including the two sessions, or the annual gatherings of the country’s top legislature and political advisory body; the Zhongguancun Forum; and the China Development Forum in Beijing, as well as the Boao Forum for Asia in Hainan province.
In fact, several AI-related panel discussions at the Boao and Zhongguancun forums saw packed houses, with attendees filling up every seat and some even standing to hear out the participants.
This overwhelming interest in AI mirrors the prominence of the nascent sector across the nation, displaying a vivid picture

Industry experts said China is fostering its own vision for the development of AI through the reliable and efficient application of AI tools across a wide range of industries, a path that differs wisely from that of the United States.
Turing Award winner Joseph Sifakis said at the Zhongguancun Forum that China is crafting its own AI vision, distinct from that of the US.
“China has a solid and extensive industrial base and a unified domestic market. This enables the country to develop more reliable AI solutions that better align with the needs of the real economy, especially in the long-awaited transition to autonomous driving,” he said.
Sifakis noted that China’s strong industrial foundation, in particular, gives it an edge while industries such as self-driving vehicles, smart cities, smart factories and intelligent farms present more opportunities. “If developed well, (all these) will give China a dominant position in industrial AI,” he said.
Kai-Fu Lee, a prominent AI expert and chairman and CEO of investment company Sinovation Ventures, said China has reached its “DeepSeek moment”. He predicted that 2025 would mark a breakout year for AI applications and large-scale model deployment in China.
Lee recalled that about nine months ago, he had expressed frustration over China’s lack of a “ChatGPT moment”, as promising Chinese AI models at the time failed to stand out and spark nationwide adoption.
“However, DeepSeek has changed that landscape. Its success has awakened the Chinese market, ushering in a new AI era for the country,” he said.
According to Lee, DeepSeek’s rise proves that “closed-source AI has no future”, and only open-source development will drive greater progress.
“As AI scaling laws shift from the pretraining stage to the inference stage, AI applications will accelerate exponentially this year,” he said.
Scaling laws describe how the performance of AI systems improves as the size of the training data, model parameters or computational resources increase.
Kuang Ziping, founding partner of Qiming Venture Partners, a toptier Chinese venture capital firm, echoed that sentiment.
While the first generation of AI saw fragmented innovation, the second generation — dubbed “AI 2.0” — will be built on infrastructure, scalability and real-world application, he said.
“There’s still a huge gap in foundational infrastructure investment,” Kuang said. “But the application layer is poised for explosive growth.”
From smart education and autonomous driving to embodied intelligence and hardware, he said the sectors that successfully integrate AI will define the future.
Zhu Xiaohu, managing partner at GSR Ventures, emphasized that generative AI must prioritize one principle above all — application is king.
Startups, he said, must embrace open-source ecosystems and rapidly iterate their products in vertical industries. The most effective businesses, he predicted, will not rely on AI alone, but on “AI plus human” hybrid models that combine intelligence with nuanced delivery capabilities.
As excitement around AI innovation builds in China, it also collides with geopolitical headwinds, especially after the nation, a major trading partner of the US, was hit with several rounds of so-called reciprocal tariffs since April, in addition to a 20 percent tariff imposed earlier this year.
Last month, the US also added dozens of additional Chinese entities, including the Beijing Academy of Artificial Intelligence and tech firm Inspur Group, to its export restrictions list.
But, the world is big enough for hundreds of countries, including the US and China, to codevelop AI, and Washington’s sanctions on high-tech sectors will only steel Beijing’s resolve to drive homegrown innovations, said industry experts and company executives.
During a panel discussion at Boao Forum for Asia, Zeng Yi, a member of the United Nations’ high-level advisory body on AI and a researcher at the Chinese Academy of Sciences’ Institute of Automation, said: “The future of AI is not decided by a handful of countries, but by nearly 200 countries and regions. The world is big enough to embrace both the US and China to codevelop AI.”
Zheng Yongnian, dean of the School of Public Policy at the Chinese University of Hong Kong (Shenzhen), criticized as “unwise “the inclusion of Chinese companies in restrictive measures aimed at hindering China’s AI progress.
“China possesses significant advantages in application scenarios, with the government actively promoting the AI Plus strategy to expedite technological implementation. US sanctions on technologies have, paradoxically, spurred China to intensify investments in these areas and foster indigenous innovation,” Zheng said.
“If China’s AI technologies continue to evolve at the current pace, the US might find itself relying on China’s original innovations in certain sectors within 10 to 15 years,” he added.
Carl Fey, a professor of strategy at BI Norwegian Business School, said that while US tech restrictions may cause short-term pain for China, they will ultimately compel the latter to fortify its technological base and sharpen its global competitiveness.
Fey warned that measures like tariffs and export bans not only slow global tech progress, but also backfire by accelerating domestic innovation.
A group of experts cited Deep-Seek as a case in point — a low-cost, open-source AI model that is transforming the industry landscape. DeepSeek’s accessible architecture enables rapid deployment, and widespread use may reshape the AI future globally, a vision where AI, like water or electricity, becomes a basic utility available to everyone.
Jiang Xiaojuan, a professor at the University of Chinese Academy of Social Sciences, said that Deep-Seek is breaking monopolies and ushering in a new era of vigorous competition, converting technical know-how into industrial might.
“In a competitive market, these challenges will naturally be resolved by the forces of the market itself,” Jiang said.
Gao Xuefeng, founder and CEO of AI data infrastructure company Fabarta, said that after DeepSeek’s breakthrough, many Chinese companies no longer hesitate to invest in AI.
“Every few months, new technological advancements emerge. Companies can’t afford to wait; they must integrate AI into their business and industry now,” Gao said, adding that every sector in China can be re-imagined through AI in the coming years.
Amid rising AI enthusiasm, Wang Zhongyuan, head of the Beijing Academy of Artificial Intelligence, a leading nonprofit AI institute, said that DeepSeek has indeed delivered impressive results, proving that China can train large-scale AI models parallel to ChatGPT 4 despite limited computing power.
Regarding artificial general intelligence, in which an AI system can match or exceed the cognitive abilities of humans in any real-world task, Wang said that the industry is still far from achieving such capabilities. “I think we are still at least five to 10 years, or even longer, from reaching that level,” he added.
(1) Optimus – Gen 2
New bot in town! Optimus Gen 2 features Tesla-designed actuators and sensors, faster and more capable hands, faster walking, lower total weight, articulated neck, and more. https://tesla.com/AI
KungFu BOT, live shooting, video without any acceleration or editing # Yushu Technology #unitree# Sp – YouTube
KungFu BOT, live shooting, video without any acceleration or editing # Yushu Technology #unitree# Spring Festival Gala robot # humanoid robot # robot #chinaservicerobots.com
Chinese Humanoid Robot Conquers Steep Outdoor Staircase to Show off Increased Mobility – YouTube
Chinese Humanoid Robot Conquers Steep Outdoor Staircase to Show off Increased Mobility
China’s first independently-developed general humanoid robot Tiangong has hit new heights with another breakthrough achievement showcasing its increasing mobility capabilities, after it successfully reached the summit of a set of steep stairs to complete an outdoor hike in a park in Beijing. https://www.cctvplus.com/news/2025021… Welcome to subscribe us on: Facebook:  / newscontent.cctvplus Twitter:
/ newscontent.cctvplus Twitter:  / cctv_plus LinkedIn:
/ cctv_plus LinkedIn:  / cctv-news-content Instagram:
/ cctv-news-content Instagram:  / cctv_video_news_agency TikTok:
/ cctv_video_news_agency TikTok:  / cctv_plus Video on Demand: www.cctvplus.com If you are in demand of this video footage, please contact with our business development team via email: service@cctvplus.com, newmedia@cctvplus.com
/ cctv_plus Video on Demand: www.cctvplus.com If you are in demand of this video footage, please contact with our business development team via email: service@cctvplus.com, newmedia@cctvplus.com
Quantitative Analysis and Optimal Design of Grasp Augmentation of Supernumerary Robotic Finger Based on Pose Solving
| Citation: | LIU Yuan, YAN Zhe, GE Ruipeng, CHENG Qian, MING Dong. Quantitative Analysis and Optimal Design of Grasp Augmentation of Supernumerary Robotic Finger Based on Pose Solving[J]. ROBOT, 2025, 47(1): 32-43. DOI: 10.13973/j.cnki.robot.240080
 |
Quantitative Analysis and Optimal Design of Grasp Augmentation of Supernumerary Robotic Finger Based on Pose Solving
-
-
Abstract
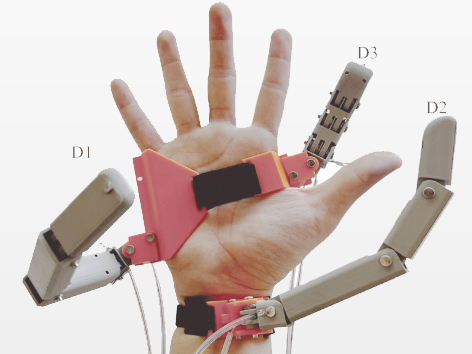
Supernumerary robotic finger (SRF) is a wearable robot that achieves motion enhancement by augmenting additional limbs for the human body, however the grasp augmentation effect is limited. To address this problem, a maximum graspable sphere solution method based on SRF and hand pose is investigated to enhance the grasping ability, and the SRF design is optimized by quantitative analysis. Firstly, the D-H (Denavit-Hartenberg) kinematic models of the human hand and SRF are constructed, the finger pose library of the human hand and SRF is obtained by the Monte Carlo method, and an analytical method to achieve stable semi-envelope grasping of the sphere is proposed based on this library. Then, the grasp augmentation ability of SRF is defined and quantified based on the radius of the maximum graspable sphere of SRF and human hand, and the rod lengths of SRF at 3 wearing positions are optimized based on this ability. Finally, the SRF prototypes are built based on the subject’s hand size and the rod lengths at 3 wearing positions before and after optimization, with which the grasping experiments are carried out on spheres with radius of 2~12 cm. The experimental results show that the grasping abilities at the 3 wearing positions are enhanced by 42.4%, 38.5% and 7.91% respectively after rod length optimization, which proves the correctness and effectiveness of the solution method.Keywords:
-
References
[1] 荆泓玮, 朱延河, 赵思恺, 等. 外肢体机器人研究现状及发展趋势[J]. 机械工程学报, 2020, 56(7): 1-9. doi: 10.3901/JME.2020.07.001JING H W, ZHU Y H, ZHAO S K, et al. Research status and development trend of supernumerary robotic limbs[J]. Journal of Mechanical Engineering, 2020, 56(7): 1-9. doi: 10.3901/JME.2020.07.001[2] WU F Y. Supernumerary robotic fingers for single-handed grasping and manipulation assistance[D]. Cambridge, USA: Massachusetts Institute of Technology, 2017.[3] WU F Y, ASADA H H. “Hold-and-manipulate” with a single hand being assisted by wearable extra fingers[C]//IEEE International Conference on Robotics and Automation. Piscataway, USA: IEEE, 2015: 6205-6212. doi: 10.1109/ICRA.2015.7140070[4] HUSSAIN I, SALVIETTI G, SPAGNOLETTI G, et al. A soft supernumerary robotic finger and mobile arm support for grasping compensation and hemiparetic upper limb rehabilitation[J]. Robotics and Autonomous Systems, 2017, 93: 1-12. doi: 10.1016/j.robot.2017.03.015[5] KIELIBA P, CLODE D, MAIMON-MOR R O, et al. Robotic hand augmentation drives changes in neural body representation[J]. Science Robotics, 2021, 6(54). doi: 10.1126/scirobotics.abd7935[6] DONG H X, ASADI E, QIU C, et al. Geometric design optimization of an under-actuated tendon-driven robotic gripper[J]. Robotics and Computer-Integrated Manufacturing, 2018, 50: 80-89. doi: 10.1016/j.rcim.2017.09.012[7] KASHEF S R, AMINI S, AKBARZADEH A. Robotic hand: A review on linkage-driven finger mechanisms of prosthetic hands and evaluation of the performance criteria[J]. Mechanism and Machine Theory, 2020, 145. doi: 10.1016/j.mechmachtheory.2019.103677[8] KRAGTEN G A, HERDER J L. The ability of underactuated hands to grasp and hold objects[J]. Mechanism and Machine Theory, 2010, 45(3): 408-425. doi: 10.1016/j.mechmachtheory.2009.10.002[9] BOS R A, PLETTENBURG D H, HERDER J L. Simplifying models and estimating grasp performance for comparing dynamic hand orthosis concepts[J]. PloS ONE, 2019, 14(7). doi: 10.1371/journal.pone.0220147[10] LLOP-HARILLO I, PÉREZ-GONZÁLEZ A, ANDRÉS-ESPERANZA J. Anthropomorphism indexes of the kinematic chain for artificial hands[J]. Journal of Bionic Engineering, 2020, 17: 501-511. doi: 10.1007/s42235-020-0040-5[11] SUN B Y, GONG X, LIANG J, et al. Design principle of a dual-actuated robotic hand with anthropomorphic self-adaptive grasping and dexterous manipulation abilities[J]. IEEE Transactions on Robotics, 2022, 38(4): 2322-2340. doi: 10.1109/TRO.2021.3132532[12] SUI M L, OUYANG Y M, JIN H, et al. A soft-packaged and portable rehabilitation glove capable of closed-loop fine motor skills[J]. Nature Machine Intelligence, 2023, 5: 1149-1160. doi: 10.1038/s42256-023-00728-z[13] GE R P, LIU Y, YAN Z, et al. Design of a self-aligning four-finger exoskeleton for finger abduction/adduction and flexion/extension motion[C]//International Conference on Rehabilitation Robotics. Piscataway, USA: IEEE, 2023. doi: 10.1109/icorr58425.2023.10304720[14] CIULLO A S, FELICI F, CATALANO M G, et al. Analytical and experimental analysis for position optimization of a grasp assistance supernumerary robotic hand[J]. IEEE Robotics and Automation Letters, 2018, 3(4): 4305-4312. doi: 10.1109/LRA.2018.2864357[15] PRATTICHIZZO D, POZZI M, BALDI T L, et al. Human augmentation by wearable supernumerary robotic limbs: Review and perspectives[J]. Progress in Biomedical Engineering, 2021, 3(4). doi: 10.1088/2516-1091/ac2294[16] 国家市场监督管理总局, 国家标准化管理委员会. 成年人手部尺寸分型: GB/T 16252-2023[S]. 北京: 中国标准出版社, 2023.State Administration for Market Regulation, Standardization Administration. Hand sizing system of adults: GB/T 16252-2023[S]. Beijing: Standards Press of China, 2023.[17] YANG W Z, WU X L, ZHANG H. Workspace modeling and analysis for dexterous hands[J]. International Journal of Humanoid Robotics, 2015, 12(1). doi: 10.1142/S0219843615500061[18] ZHANG X Y, LI H Y, ZHANG B, et al. Kinematics analysis and grasping simulation of a humanoid underactuated dexterous hand[C]//IEEE International Conference on Robotics and Biomimetics. Piscataway, USA: IEEE, 2021: 55-60. doi: 10.1109/robio54168.2021.9739457[19] BULLOCK I M, FEIX T, DOLLAR A M. Analyzing human fingertip usage in dexterous precision manipulation: Implications for robotic finger design[C]//IEEE/RSJ International Conference on Intelligent Robots and Systems. Piscataway, USA: IEEE, 2014: 1622-1628. doi: 10.1109/IROS.2014.6942772[20] CUI J, YAN S B, HU J, et al. A metric to design spring stiffness of underactuated fingers for stable grasp[J]. Robotics and Autonomous Systems, 2018, 102: 1-12. doi: 10.1016/j.robot.2018.01.001[21] LIOW L, CLARK A B, ROJAS N. OLYMPIC: A modular, tendon-driven prosthetic hand with novel finger and wrist coupling mechanisms[J]. IEEE Robotics and Automation Letters, 2020, 5(2): 299-306. doi: 10.1109/LRA.2019.2956636[22] VOTTA A M, GÜNAY S Y, ZYLICH B, et al. Kinematic optimization of an underactuated anthropomorphic prosthetic hand[C]//IEEE/RSJ International Conference on Intelligent Robots and Systems. Piscataway, USA: IEEE, 2020: 3397-3403. doi: 10.1109/iros45743.2020.9341640 -
Related Articles
-
Target Position-guided In-hand Re-orientation for Five-fingered Dexterous Hands
| Citation: | ZHANG Lingjun, TANG Liang, LIU Lei. Target Position-guided In-hand Re-orientation for Five-fingered Dexterous Hands[J]. ROBOT, 2025, 47(1): 10-21. DOI: 10.13973/j.cnki.robot.240019 |
Target Position-guided In-hand Re-orientation for Five-fingered Dexterous Hands
-
Abstract
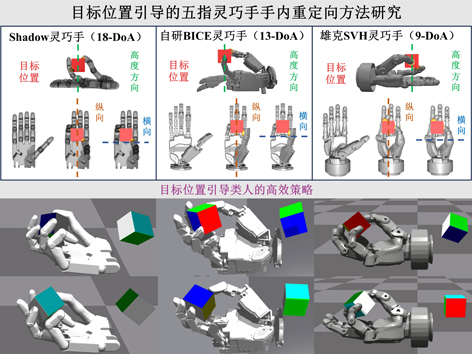
Re-orientation involves rotating an object to a target configuration, with the most challenging case being the rotation from an arbitrary initial configuration to an arbitrary target configuration. To address the challenge of efficiently performing in-hand re-orientation tasks in a more human-like manner by guiding anthropomorphic five-fingered dexterous hands with different degrees of actuation (DoA), a target position-guided in-hand object re-orientation policy generation method is proposed. Firstly, a feasible principle for designing target positions is proposed, inspired by the operation characteristics of human hands during in-hand re-orientation and based on the distribution characteristics of DoA in anthropomorphic five-fingered dexterous hands. The difference between the actual and target positions of the object during re-orientation process is utilized as a component of the immediate reward to guide anthropomorphic five-fingered dexterous hands in maintaining the object near the target. Secondly, a method is developed inspired by the preparatory states of human hands before performing re-orientation tasks, to sample the joint positions of anthropomorphic five-fingered dexterous hands when resetting the state everytime, aiming to enhance manipulation capabilities. Finally, the re-orientation policy is trained using the proximal policy optimization (PPO) algorithm based on the long short-term memory (LSTM) network and asymmetric actor-critic architecture. Simulation results show that the proposed method enables the 9-DoA Schunk SVH dexterous hand, the 13-DoA BICE dexterous hand developed by Beijing Institute of Control Engineering (BICE), and the 18-DoA Shadow dexterous hand to approach the predefined maximum number of consecutive successes when performing re-orientation tasks. Moreover, compared with in-hand object re-orientation policy generation method without target position guidance, the proposed method significantly reduces the average number of steps required to perform re-orientation tasks. The proposed method enables anthropomorphic five-fingered dexterous hands with different DoA to efficiently perform object re-orientation tasks in a human-like manner through coordinated action of the palm and fingers, significantly enhancing operational efficiency.Keywords:
-
References
[1] BICCHI A. Hands for dexterous manipulation and robust grasping: A difficult road toward simplicity[J]. IEEE Transactions on Robotics and Automation, 2000, 16(6): 652-662. doi: 10.1109/70.897777[2] KUMAR V, TODOROV E, LEVINE S. Optimal control with learned local models: Application to dexterous manipulation[C]// IEEE International Conference on Robotics and Automation. Piscataway, USA: IEEE, 2016: 378-383. doi: 10.1109/ICRA.2016.7487156[3] RAJESWARAN A, KUMAR V, GUPTA A, et al. Learning complex dexterous manipulation with deep reinforcement learning and demonstrations[C]//Robotics: Science and Systems XIV. 2018. doi: 10.15607/RSS.2018.XIV.049[4] NAGABANDI A, KONOLIGE K, LEVINE S, et al. Deep dynamics models for learning dexterous manipulation[C]//Proceedings of the Conference on Robot Learning. 2020: 1101-1112. https://proceedings.mlr.press/v100/nagabandi20a.html[5] ANDRYCHOWICZ M, BAKER B, CHOCIEJ M, et al. Learning dexterous in-hand manipulation[J]. International Journal of Robotics Research, 2020, 39(1): 3-20. doi: 10.1177/0278364919887447[6] CHEN T, XU J, AGRAWAL P. A system for general in-hand object re-orientation[C]//Proceedings of the 5th Conference on Robot Learning. 2022: 297-307. https://proceedings.mlr.press/v164/chen22a.html[7] CHEN T, TIPPUR M, WU S, et al. Visual dexterity: In-hand re-orientation of novel and complex object shapes[J]. Science Robotics, 2023, 8(84). doi: 10.1126/scirobotics.adc9244[8] HUANG W, MORDATCH I, ABBEEL P, et al. Generalization in dexterous manipulation via geometry-aware multi-task learning[DB/OL]. (2021-11-04) [2024-01-02]. doi: 10.48550/arXiv.2111.03062[9] PETRENKO A, ALLSHIRE A, STATE G, et al. DexPBT: Scaling up dexterous manipulation for hand-arm systems with population based training[C]//Robotics: Science and Systems XIX. 2023. doi: 10.15607/RSS.2023.XIX.037[10] MA Y J, LIANG W, WANG G, et al. Eureka: Human-level reward design via coding large language models][DB/OL]. (2023-10-06) [2024-03-28]. https://arxiv.org/abs/2310.12931[11] KHANDATE G, HAAS-HEGER M, CIOCARLIE M. On the feasibility of learning finger-gaiting in-hand manipulation with intrinsic sensing[C]//International Conference on Robotics and Automation. Piscataway, USA: IEEE, 2022: 2752-2758. doi: 10.1109/ICRA46639.2022.9812212[12] KHANDATE G, SHANG S, CHANG E T, et al. Sampling-based exploration for reinforcement learning of dexterous manipulation[DB/OL]. (2023-05-23) [2024-01-20]. https://arxiv.org/abs/2303.03486[13] XU Y Z, WAN W K, ZHANG J L, et al. UniDexGrasp: Universal robotic dexterous grasping via learning diverse proposal generation and goal-conditioned policy[C]//IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway, USA: IEEE, 2023: 4737-4746.[14] Shadow Robot Company. Shadow robot dexterous hand] [EB /OL]. (2011-07-25) [2023-12-18]. https://www.shadowrobot.com/dexterous-hand-series/[15] Schunk SE & Co. KG. SVH 5-finger hand][EB/OL]. (2022-12-01) [2023-12-19]. http://wiki.ros.org/schunk_svh_driver[16] SCHULMAN J, WOLSKI F, DHARIWAL P, et al. Proximal policy optimization algorithms[DB/OL]. (2017-08-28) [2023-12-19]. doi: 10.48550/arXiv.1707.06347[17] HOCHREITER S, SCHMIDHUBER J. Long short-term memory][J]. Neural Computation, 1997, 9(8): 1735-1780. doi: 10.1162/neco.1997.9.8.1735[18] MAKOVIYCHUK V, WAWRZYNIAK L, GUO Y, et al. Isaac Gym: High performance GPU-based physics simulation for robot learning[DB/OL]. (2021-08-24)[2023-12-19]. https://arxiv.org/abs/2108.10470[19] NAIR V, HINTON G E. Rectified linear units improve restricted Boltzmann machines][C]//International Conference on Machine Learning. 2010: 807-814. https://api.semanticscholar.org/CorpusID: 15539264 -
Related Articles
Robotic Grasping Technology Based on Shape Analysis and Probabilistic Reasoning
School of Computer Science and Engineering, South China University of Technology, Guangzhou 510006, China
-
-
Abstract
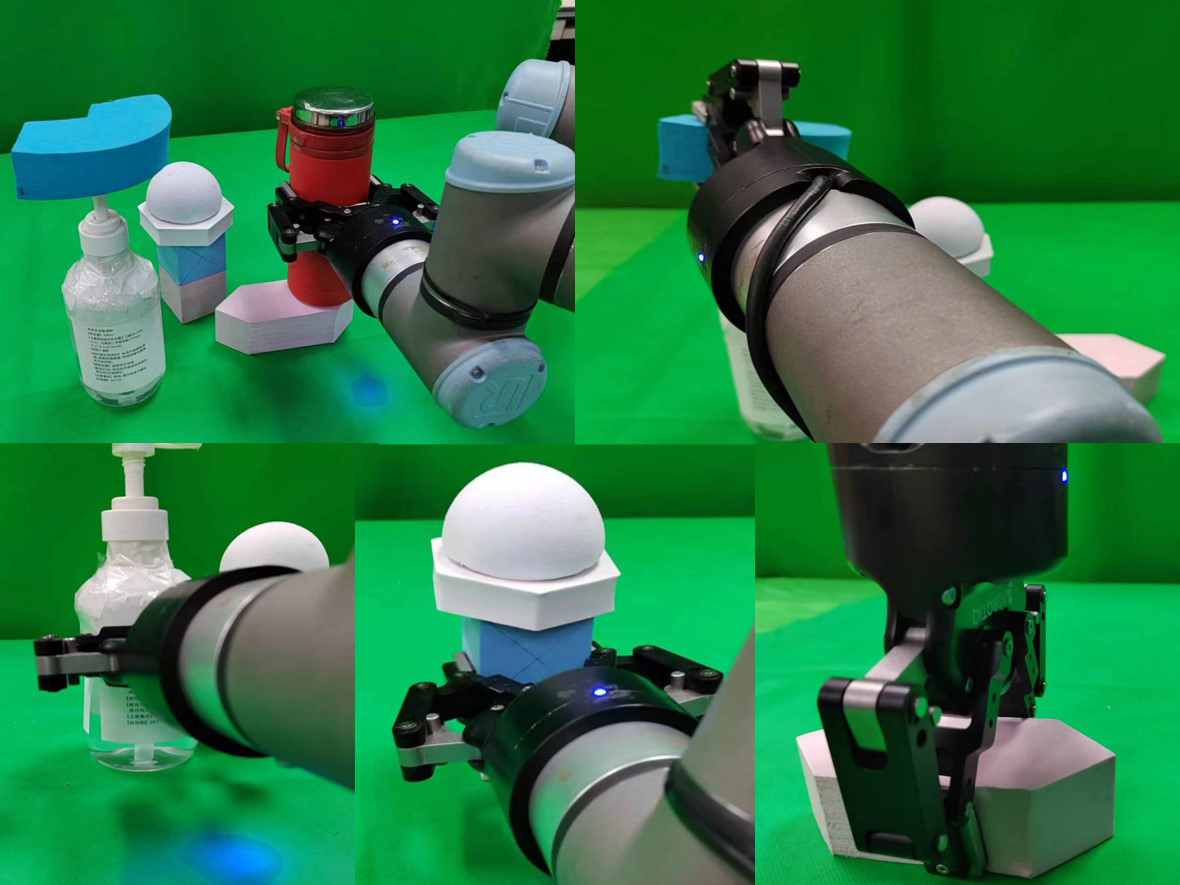
In the task of grasping irregular objects, the transported objects may shake and fall off due to their complex and diverse shapes and structures. For these issues, a robotic grasping technology based on shape analysis and probabilistic reasoning is proposed. Firstly, the dispersivity and flatness of the object’s point cloud are analyzed to generate a set of candidate grasping poses. Then, the factors influencing the shaking and falling off of the object are qualitatively analyzed in the simulation scenario, and the number of successful grasping and rotation-translation experiments is statistically counted in the simulation. The stability of the grasp pose is quantitatively analyzed using the conditional expectation method, and a PointNet discriminator is trained to evaluate and rank the candidate grasp poses. The grasping is ultimately completed with the optimal grasp pose. The experimental results indicate that the proposed method can solve the issue of shaking and falling off of irregular objects during the grasping and transporting process. Compared with the benchmark method, the average grasping success rate is improved to 89.2%, an increase of 2.6%, and the average transportation stability is enhanced to 84.2%, an increase of 22.7%. The proposed method enables intelligent grasping of objects in multi-object stacking scenarios, ensuring stability during the grasping and transporting process, and establishing a logical sequence for grasping.Keywords:
-
References
[1] 陈淑婷. 中国工业机器人产业创新网络演化研究[D]. 广州: 广州大学, 2022. doi: 10.27040/d.cnki.ggzdu.2022.000652CHEN S T. The research on innovation network evolution of Chinese industrial robot industry[D]. Guangzhou: Guangzhou University, 2022. doi: 10.27040/d.cnki.ggzdu.2022.000652[2] 潘静楠. 人口年龄结构老化、劳动力流动与机器换人[D]. 杭州: 浙江大学, 2022. doi: 10.27461/d.cnki.gzjdx.2022.000490PAN J N. Aging of population age structure, labor migration and robot replacement[D]. Hangzhou: Zhejiang University, 2022. doi: 10.27461/d.cnki.gzjdx.2022.000490[3] 刘亚欣, 王斯瑶, 姚玉峰, 等. 机器人抓取检测技术的研究现状[J]. 控制与决策, 2020, 35(12): 2817-2828. doi: 10.13195/j.kzyjc.2019.1145LIU Y X, WANG S Y, YAO Y F, et al. Recent researches on robot autonomous grasp technology[J]. Control and Decision, 2020, 35(12): 2817-2828. doi: 10.13195/j.kzyjc.2019.1145[4] ZHANG H B, TANG J, SUN S G, et al. Robotic grasping from classical to modern: A survey[DB/OL]. [2024-02-01]. https://arxiv.org/abs/2202.03631[5] DENG Z, JONETZKO Y, ZHANG L, et al. Grasping force control of multi-fingered robotic hands through tactile sensing for object stabilization[J]. Sensors, 2020, 20(4). doi: 10.3390/s20041050[6] MATAK M, HERMANS T. Planning visual-tactile precision grasps via complementary use of vision and touch[J]. IEEE Robotics and Automation Letters, 2023, 8(2): 768-775. doi: 10.1109/LRA.2022.3231520[7] SIDDIQUI M S, COPPOLA C, SOLAK G, et al. Grasp stability prediction for a dexterous robotic hand combining depth vision and haptic Bayesian exploration[J]. Frontiers in Robotics and AI, 2021, 8. doi: 10.3389/frobt.2021.703869[8] CHEN M Q, LI S D, SHUANG F, et al. Development of a three-fingered multi-modality dexterous hand with integrated embedded high-dimensional sensors[J]. Journal of Intelligent & Robotic Systems, 2023, 108. doi: 10.1007/s10846-023-01875-6[9] XIE Z, LIANG X, ROBERTO C. Learning-based robotic grasping: A review[J]. Frontiers in Robotics and AI, 2023, 10. doi: 10.3389/frobt.2023.1038658[10] DU G G, WANG K, LIAN S G, et al. Vision-based robotic grasping from object localization, object pose estimation to grasp estimation for parallel grippers: A review[J]. Artificial Intelligence Review, 2021, 54(3): 1677-1734. doi: 10.1007/s10462-020-09888-5[11] OUYANG W X, HUANG W H, MIN H S. Robot grasp with multi-object detection based on RGB-D image[C]// China Automation Congress. Piscataway, USA: IEEE, 2021: 6543-6548. doi: 10.1109/CAC53003.2021.9728678[12] ZHANG S T, GUO Z C, HUANG J, et al. Robotic grasping position of irregular object based Yolo algorithm[C]// International Conference on Automation, Control and Robotics Engineering. Piscataway, USA: IEEE, 2020: 642-646. doi: 10.1109/CACRE50138.2020.9229933[13] LIU D, TAO X T, YUAN L H, et al. Robotic objects detection and grasping in clutter based on cascaded deep convolutional neural network[J]. IEEE Transactions on Instrumentation and Measurement. 2022, 71. doi: 10.1109/TIM.2021.3129875[14] MAHLER J, LIANG J, NIYAZ S, et al. Dex-Net 2.0: Deep learning to plan robust grasps with synthetic point clouds and analytic grasp metrics[DB/OL]. (2017-08-08) [2024-02-01]. https://arxiv.org/abs/1703.09312.[15] LIANG H Z, MA X J, LI S, et al. PointNetGPD: Detecting grasp configurations from point sets[C]// International Conference on Robotics and Automation. Piscataway, USA: IEEE, 2019: 3629-3635. doi: 10.1109/ICRA.2019.8794435[16] DUAN H N, WANG P, HUANG Y Y, et al. Robotics dexterous grasping: The methods based on point cloud and deep learning[J]. Frontiers in Neurorobotics, 2021, 15. doi: 10.3389/fnbot.2021.658280[17] 邬金.论异形液体容器造型及其销售包装设计[D].苏州: 苏州大学, 2018. https://cdmd.cnki.com.cn/Article/CDMD-10285-1018146406.htmWU J. On the design of the shaped liquid containers and their sales packaging design[D]. Suzhou: Soochow University, 2018. https://cdmd.cnki.com.cn/Article/CDMD-10285-1018146406.htm[18] 朱枭. 基于多目视觉的异形瓶标签图像高速拼接系统研究[D]. 上海: 上海电机学院, 2023. doi: 10.27818/d.cnki.gshdj.2023.000110ZHU X. Fast image stitching system for irregular bottle based on multi-view stereo vision[D]. Shanghai: Shanghai Dianji University, 2023. doi: 10.27818/d.cnki.gshdj.2023.000110[19] MANUELLI L, GAO W, FLORENCE P, et al. KPAM: KeyPoint affordances for category-level robotic manipulation[C]// International Symposium of Robotics Research. Cham, Switzerland: Springer, 2022: 132-157. doi: 10.1007/978-3-030-95459-8_9[20] DONG H X, ZHOU J D, QIU C, et al. Robotic manipulations of cylinders and ellipsoids by ellipse detection with domain randomization[J]. IEEE/ASME Transactions on Mechatronics, 2023, 28(1): 302-313. doi: 10.1109/TMECH.2022.3193895[21] WEN B, LIAN W, BEKRIS K, et al. CaTGrasp: Learning category-level task-relevant grasping in clutter from simulation[C]// International Conference on Robotics and Automation. Piscataway, USA: IEEE, 2022: 6401-6408. doi: 10.1109/ICRA46639.2022.9811568[22] CHARLES R Q, HAO S, MO K, et al. PointNet: Deep learning on point sets for 3D classification and segmentation[C]// IEEE Conference of Computer Vision and Pattern Recognition. Piscataway, USA: IEEE, 2017: 77-85. doi: 10.1109/CVPR.2017.16[23] XIANG Y, SCHMIDT T, NARAYANAN V, et al. PoseCNN: A convolutional neural network for 6D object pose estimation in cluttered scenes[DB/OL]. (2018-05-26) [2024-02-01]. https://arxiv.org/abs/1711.00199.[24] TEN PAS A, GUALTIERI M, SAENKO K, et al. Grasp pose detection in point clouds[J]. International Journal of Robotics Research, 2017, 36(13-14): 1455-1473. doi: 10.1177/0278364917735594 -
Related Articles
-
1.4m industrial welding robot 2 m argon arc welding robot automatically becomes fully CNC Robots
1.4m industrial welding robot 2 m argon arc welding robot automatically becomes fully CNC Robots
product description:
Scope of work
1.4 m
Import or not
no
Applicable material
metal
Control mode
Auto
Electric current
Alternating current
Input voltage
380V
Principle of action
inverse
Cooling mode
Air cooling
Quality guarantee
1 year
The name of a product or commodity
Industrial welding robot
Applicable industry
Be common
Welding principle
Swing welding, fish pattern welding, automatic welding
Placement mode
Ground installation
Saleable land
The whole country
use
Automation is connected to various workpieces
Price description
Price: The display price of the goods in Ipurchasing, the specific transaction price may change due to the participation of the goods in activities, and may also change with the purchase quantity or the selected specifications. If the user and the merchant reach an agreement offline, the settlement price of the offline agreement shall prevail. If the user completes the online purchase on Ipurchasing, the final price of the order settlement page shall prevail.
Buying price: The activity price of the product to participate in the marketing campaign may also change with the purchase quantity or the selected specifications, and the final price is subject to the order settlement page.
Special note: The prices marked in the form of text or pictures in the product details page (including the main picture) may be the prices under the specific activity period, the specific price of the product is subject to the price of the order settlement page or the actual transaction price reached by you and the business after contact; If you find the price of the event or the event information is abnormal, it is recommended to consult the merchant before purchasing.
Scan to add us on WeChat
Click to copy WeChat ID